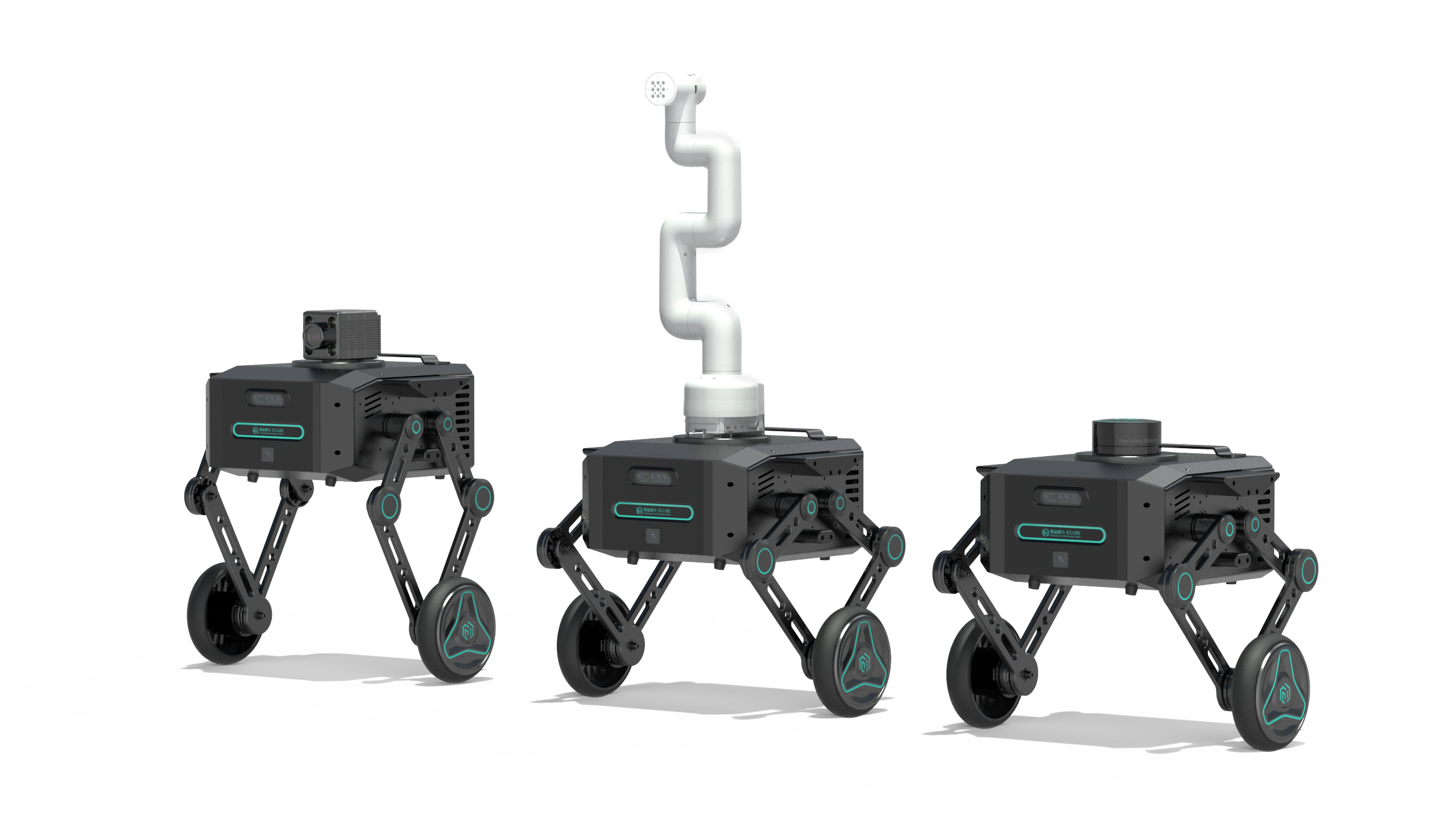
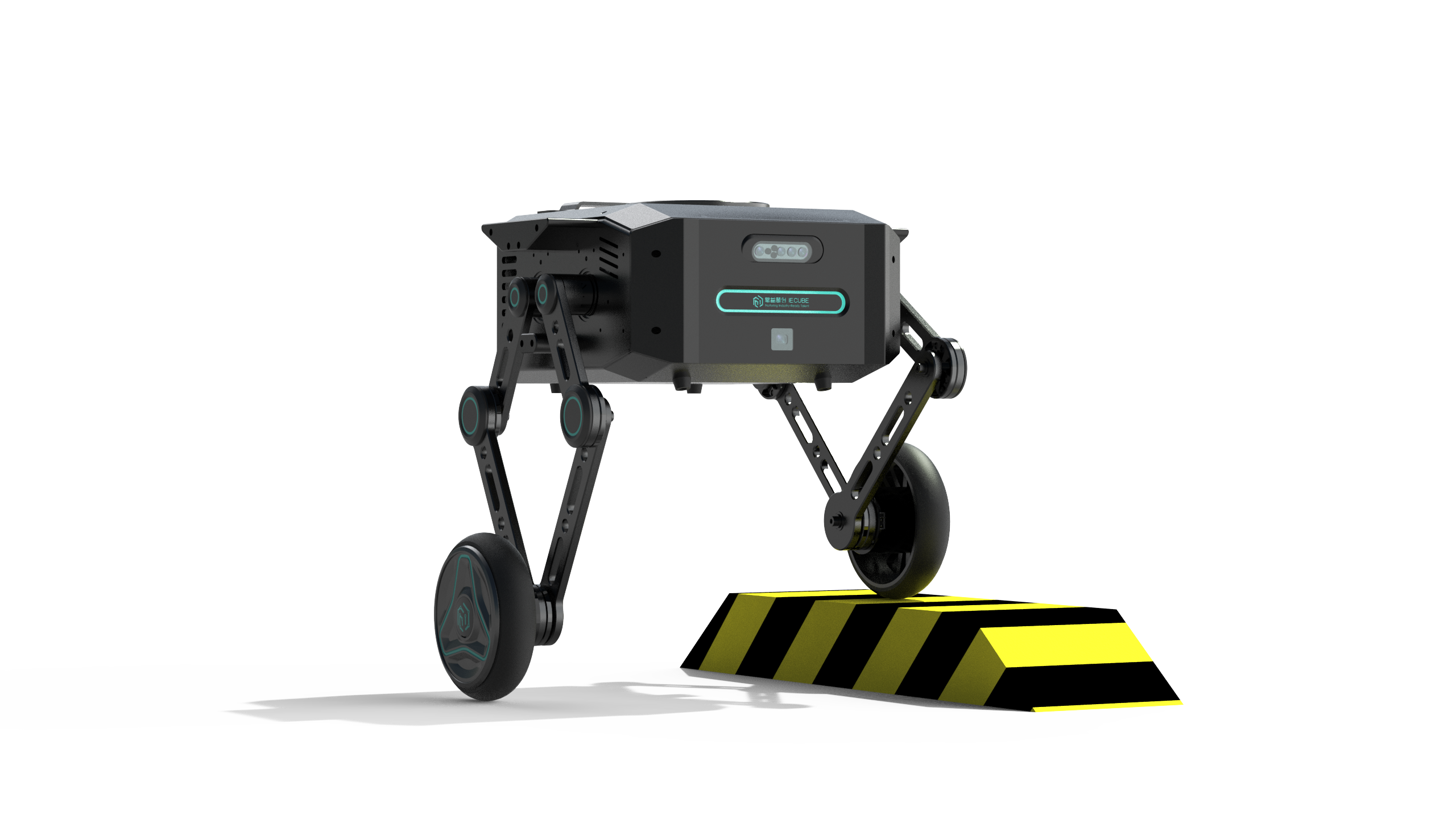
产品中心
 查看IECUBE所有自研产品 >
查看IECUBE所有自研产品 >
 查看NI所有产品 >
查看NI所有产品 >
查看IECUBE所有自研产品 >
- 半导体教学设备
- IECUBE-3831集成电路多功能实验基础平台 IECUBE-3832实验用半导体参数分析仪 IECUBE-3833集成电路实景操作VR实训平台 IECUBE-3835数智化半导体参数实测分析平台 IECUBE-3839集成电路研发及量产测试通用平台 IECUBE-3830集成电路工艺制造VR实训平台 IECUBE-3100集成电路测试实训平台
查看NI所有产品 >